Signál PWM (Pulse Width Modulation, pulsně šířková modulace) je ve sdělovací technice dobře znám. Hodnota přenášeného signálu je v přenosu pomocí dvoustavového signálu (napětí) „zakódována“ jako poměr mezi stavy zapnuto/vypnuto. Tomuto poměru se říká střída. Cyklus, kdy dojde k přenosu jedné střídy, se nazývá perioda, a ta se pohybuje v zlomcích sekundy až mikrosekundách. Pomocí PWM signálu se přenáší relativní hodnota v rozsahu 0 až 100 %. Jedná se tedy o jakési velice rychlé „blikání“ s proměnnou délkou bliknutí a konstantní frekvencí. PWM signál se používá v radiotechnice pro modulaci sdělovacího signálu, v elektrotechnice pro výkonové řízení motorů, stmívačů a dalších silových prvků.
PWM signál se ale také v trochu jiné formě vyskytuje v systémech řízení budov. Využívá se zde pro řízení ventilů s termickým pohonem. Zde bychom měli upozornit na rozdíl mezi pohonem
I když se u termických pohonů v principu také jedná o dvoustavové řízení, protože signál nabývá buď plné hodnoty (24 V st nebo 230 V st, podle typu) nebo 0 V, pod pojmem „dvoustavové řízení“ máme u pohonů na mysli systém, v němž je pohon v ustáleném stavu buď zcela otevřen, nebo zcela uzavřen. Řízení pulsně modulovaným signálem PWM se někdy také nazývá kvazispojité řízení, protože k přenosu výkonu a informace se nepoužívá analogový signál, ale právě toto „blikání“ s proměnnou střídou. Perioda PWM signálu je (na rozdíl od sdělovací techniky a průmyslu) v systémech řízení budov několik desítek vteřin. Tím se omezí frekvence spínání výkonových členů, což může mít pozitivní vliv na vyzařované elektromagnetické rušení. Termické pohony přesto fungují uspokojivě díky své delší časové konstantě: doba potřebná pro plný zdvih ventilu se při 100% signálu pohybuje mezi 2,5 až 6 minutami.
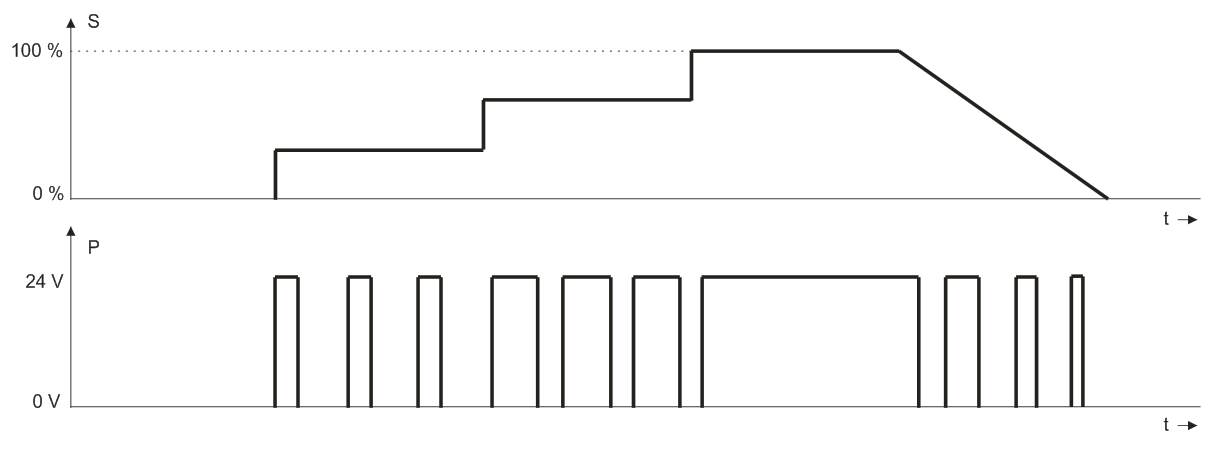 Obr. 1 – PWM signál, S: velikost signálu, P: výstupní napětí PWM pro 24 V st
Obr. 1 – PWM signál, S: velikost signálu, P: výstupní napětí PWM pro 24 V st
Princip funkce termického ventilu je následující: Topný prvek je zahříván procházejícím proudem z řídicího signálu PWM. Vyvinuté teplo působí na prvek z materiálu s vysokou teplotní roztažností, který mění svůj objem a tlačí na dřík ventilu tím více, čím více je zahříván. Změnou střídy řídicího signálu pak dokážeme v podstatě spojitě měnit míru otevření ventilu a tím i průtok topného či chladicího média. Ventily mají v ustáleném stavu spotřebu kolem 3 až 6 VA, podle typu, ovládací síly a řídicího napětí.
Důležitou vlastností termického pohonu je zpoždění reakce při otevírání ze studeného stavu. Po připojení napájecího napětí trvá minutu až dvě, než pohon zareaguje a začne se pohybovat – viz první část křivek na obr. 2, kde vidíme, že během prvních 2,5 až 3,5 min., kdy je přiveden signál 100 %, zůstává ventil zcela uzavřen. Teprve po prohřátí mechanismu se začíná dřík pohybovat a ventil zcela otevírá až po dalších desítkách vteřin. V praxi je tento jev nepříjemný u topných konvektorů, které při přechodu z útlumového na denní režim několik prvních minut po startu cirkulují v místnosti studený vzduch, což v zimním období není komfortní. Jako protiopatření se buď pohon trvale předehřívá občasnými impulsy i v útlumovém režimu, aby se interval náběhu zkrátil na minimum, nebo se zavádí zpoždění startu ventilátorů v délce asi 3 minut, po nichž je ventil již alespoň částečně otevřen a při startu konvektoru v registru proudí horká voda.
Termický pohon má dále tu vlastnost, že pracuje správně pouze při teplotách okolí do cca. 40 °C. Při vyšších teplotách není zaručeno, že mechanismus bude zcela uzavřen, a může tak dojít k podtékání ventilu. Pozor tedy při instalaci pohonů do distribučních boxů a podobných uzavřených či tepelně izolovaných prostor.
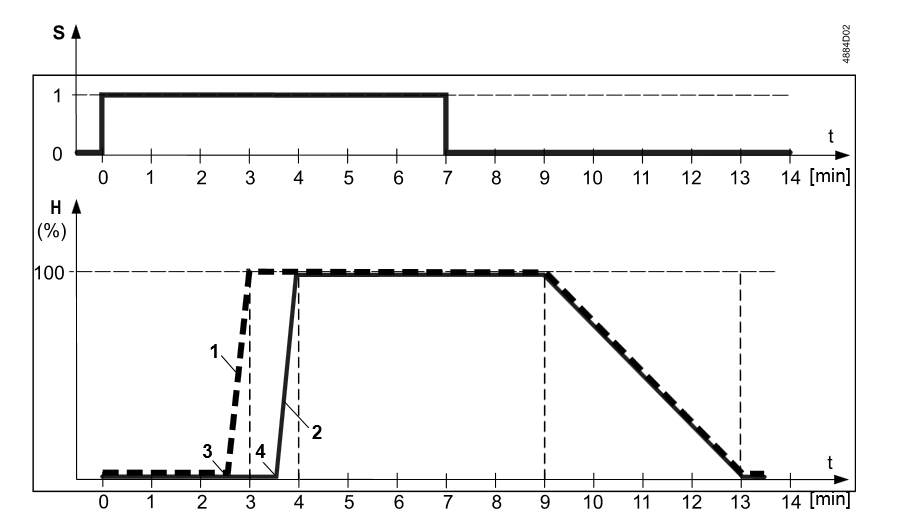 Obr. 2 – Zdvih ventilu vůči napájecímu napětí pohonu v čase. S: napětí na pohonu, H: zdvih ventilu, 1: pohony na 230 V st, 2: pohony na 24 V st, 3,4: začátek otevírání ventilu. (Zdroj: Siemens)
Obr. 2 – Zdvih ventilu vůči napájecímu napětí pohonu v čase. S: napětí na pohonu, H: zdvih ventilu, 1: pohony na 230 V st, 2: pohony na 24 V st, 3,4: začátek otevírání ventilu. (Zdroj: Siemens)
Signál PWM najdeme na elektronických pokojových termostatech, regulátorech fancoilů, chladicích panelů a konvektorů, ale i na výstupních modulech. Jako výkonový člen bývá použit triak. Při projektování často řešíme otázku „kolik pohonů ventilů lze připojit na jeden triakový výstup?“ Regulátory mají obvykle v dokumentaci uveden maximální přípustný proud triakem. Je nutné si ale uvědomit, že termické pohony mají za studena několikrát menší odpor, než v ustáleném stavu, a tedy i počáteční proud je několikrát větší, než proud trvalý. Musíme proto respektovat tuto vyšší hodnotu počátečního proudu. Při napojování více pohonů na jeden regulátor tedy máme několik řešení:
U řízení více topných těles jedním signálem radiátory naprostou většinu času nepracují na plný výkon. Při topení na 20 až 30 % výkonu může dojít k situaci, kdy vlivem nerovnoměrných hydronických poměrů v topném systému některá z těles trochu topí a některá ne. Celkový dodávaný výkon do místnosti přitom přesně pokrývá ztráty, tedy regulace funguje správně. Uživatel tento stav ovšem vnímá nelibě, protože „některé radiátory netopí“ – proti tomu se ale dá kromě osvěty těžko něco dělat.
Regulační algoritmus má obvykle běžnou PI charakteristiku, požadavek 0…100 % je přiveden do PWM modulátoru, jehož výstupem je řízen triak. Dobrých výsledků se ale u řízení radiátorů dá dosáhnout i s dvoustavovou regulací s minimální hysterezí v hodnotách desetin K, většinou díky setrvačnosti topného tělesa.
Při servisu a uvádění do provozu potřebujeme kontrolovat, zda výstup regulátoru poskytuje výstupní signál. Při tom je nejprve třeba přivést výstup do aktivního stavu. To se obvykle dělá zvýšením požadované hodnoty (pro topení) nebo jejím snížením (pro chlazení). Funguje to dobře u dvoustavových nebo analogových výstupů, ovšem u PWM menšího než 100 % může stav triaku ještě záviset na tom, v jaké části periody se výstupní signál právě nachází. Navíc interní PI(D) algoritmus může výstupní signál měnit tak, že plný signál (100 %) se na výstupu objeví až a několik minut. Vzhledem k délce periody (desítky sekund) lze snadno vyhodnotit stav, kdy při měření není na výstupu napětí, omylem jako poruchu triaku. Naopak při měření pomocí vysokoimpedančních multimetrů někdy naměříme na zavřeném triaku, který není zapojen na pohon ventilu, nakmitané napětí, což může vzbudit dojem, že výstup je aktivní. Doporučuje se proto pro indikaci stavu výstupu použít například LED diodu s předřazeným odporem cca. 2k2 pro 24 V st nebo ještě lépe nízkovýkonové indikační žárovky (pro 24 V nebo 230 V st). Některé pohony, např. Siemens ASY23…LD, již mají v těle indikační LED, která při přítomnosti řídicího napětí svítí. Světelná indikace usnadní diagnostiku i v případech, kdy kontrolujeme napětí na hlavici ventilu, který se nachází na opačném konci místnosti, než je regulátor. Odhalíme tím například přeseknuté nebo chybně zapojené kabely v podlaze.
Některé regulátory (např. Domat UC100, UC200, FC010) mají i tzv. oživovací mód: při několikasekundovém stisku ovládacího knoflíku během připojení napájení k regulátoru přejde přístroj do stavu, kdy výstupy nejsou řízeny regulačními algoritmy, ale ručně – nastavením knoflíku. Tak můžeme každý výstup manuálně přivést do trvalého aktivního stavu a pohodlně měřit napětí na pohonech. Aktivita výstupů je indikována i na LCD displeji. Stejně tak jdou ručně řídit relé pro ovládání fancoilu.
Častým problémem při projektování je, že armatury i s pohony dodává topenář nebo dodavatel konvektorů či fancoilů – a regulátor pak profese MaR. Pak je nutné domluvit rozhraní:
Pokud MaR dodává pohony a armatury jsou dodávkou jiných profesí, situace je komplikovanější a musíme specifikovat:
Jelikož se termické ventily v instalacích vyskytují vždy ve větším množství (v desítkách až stovkách stejných kanceláří nebo pokojů), každá chyba s sebou nese vysoké náklady na výměnu a časové ztráty vlivem dodacích lhůt.
Práci s pohony řízenými signálem PWM mohou usnadnit speciální výstupní moduly, například Domat M312 s 8 triakovými výstupy na 24 V st. Po sběrnici RS485 s protokolem Modbus RTU se do registrů pro jednotlivé výstupy posílá hodnota 0…100 % a signál PWM je vytvářen přímo v modulu. Výchozí perioda PWM signálu je 100 s, přičemž tuto hodnotu lze po sběrnici změnit. Pro řízení hlavic s napájením 230 V st slouží modul M313. Moduly jsou vhodné především pro instalaci do rozdělovacích boxů, protože od regulátorů jednotlivých místností není nutné vést kabely k termickým pohonům, které jsou v boxech instalovány. Požadavky na otevření ventilů se čtou po sběrnici a posílají do modulu po komunikaci pomocí vstupně-výstupních proměnných.
Závěrem je nutné upozornit, že pohony se signálem PWM jsou zcela nevhodné pro ovládání ventilů VZT jednotek s úpravou venkovního vzduchu. U nich totiž potřebujeme reakční dobu v řádu max. desítek sekund, abychom zaručili řádnou funkci protizámrazové ochrany. Není to funkční řešení ani u malých jednotek s ventily např. DN25, pro něž existují termické pohony odpovídající dimenze i síly. Termické pohony s řídicím signálem PWM tedy poskytují spolehlivé a cenově dostupné řešení pro ovládání zónových zařízení, ovšem pouze tehdy, jsou-li řádně naprojektovány, instalovány a uvedeny do provozu.
